Integração dos sistemas
Introdução
Este documento descreve a integração do chatbot do WhatsApp com o ROS2 e o robô Turtlebot3, utilizando a biblioteca SocketIO. Este esforço é parte da terceira fase de um projeto de cinco sprints, focando na melhoria dos processos logísticos na fábrica da Ambev em Guarulhos. A integração permite a comunicação eficiente entre o chatbot e o sistema robótico, facilitando operações autônomas e interações em tempo real.
Observação: SocketIO é uma biblioteca JavaScript para aplicações web que permite comunicação bidirecional em tempo real entre clientes e servidores. É amplamente utilizada por sua capacidade de trabalhar com comunicação baseada em eventos e por sua compatibilidade com uma variedade de ambientes e linguagens de programação. Escolhemos essa biblioteca baseada em sua facilidade de implementação de uma comunicação bidirecional, essencial para a eficiência e dinamismo da nossa solução integrada.
Arquitetura da Integração
Nossa solução de integração é composta por três componentes principais, interligados através de um servidor SocketIO. Abaixo, detalhamos cada componente e descrevemos o fluxo de comunicação envolvendo esse servidor.
Chatbot do WhatsApp:
- Função: Interage com os usuários, capturando comandos e solicitações.
- Comunicação: Utiliza a API do WhatsApp para interagir com os usuários. Ao receber uma solicitação, o chatbot se conecta ao servidor SocketIO e envia os dados para o Middleware ROS2.
Servidor SocketIO:
- Função: Facilita a comunicação em tempo real entre o chatbot e o Middleware ROS2.
- Comunicação: Atua como um hub central, recebendo dados do chatbot e redirecionando-os ao Middleware ROS2. O servidor SocketIO garante uma conexão estável e eficiente, essencial para a troca rápida de informações.
Middleware ROS2:
- Função: Recebe dados do servidor SocketIO e controla o Turtlebot3.
- Comunicação: Estabelece comunicação com o servidor SocketIO para receber comandos do chatbot. Processa essas informações e as traduz em ações específicas para o Turtlebot3.
Turtlebot3:
- Função: Executa as ações com base nas instruções recebidas.
- Comunicação: Recebe comandos do Middleware ROS2 e realiza as ações necessárias. A comunicação entre o Middleware ROS2 e o Turtlebot3 é efetuada através dos nós ROS2.
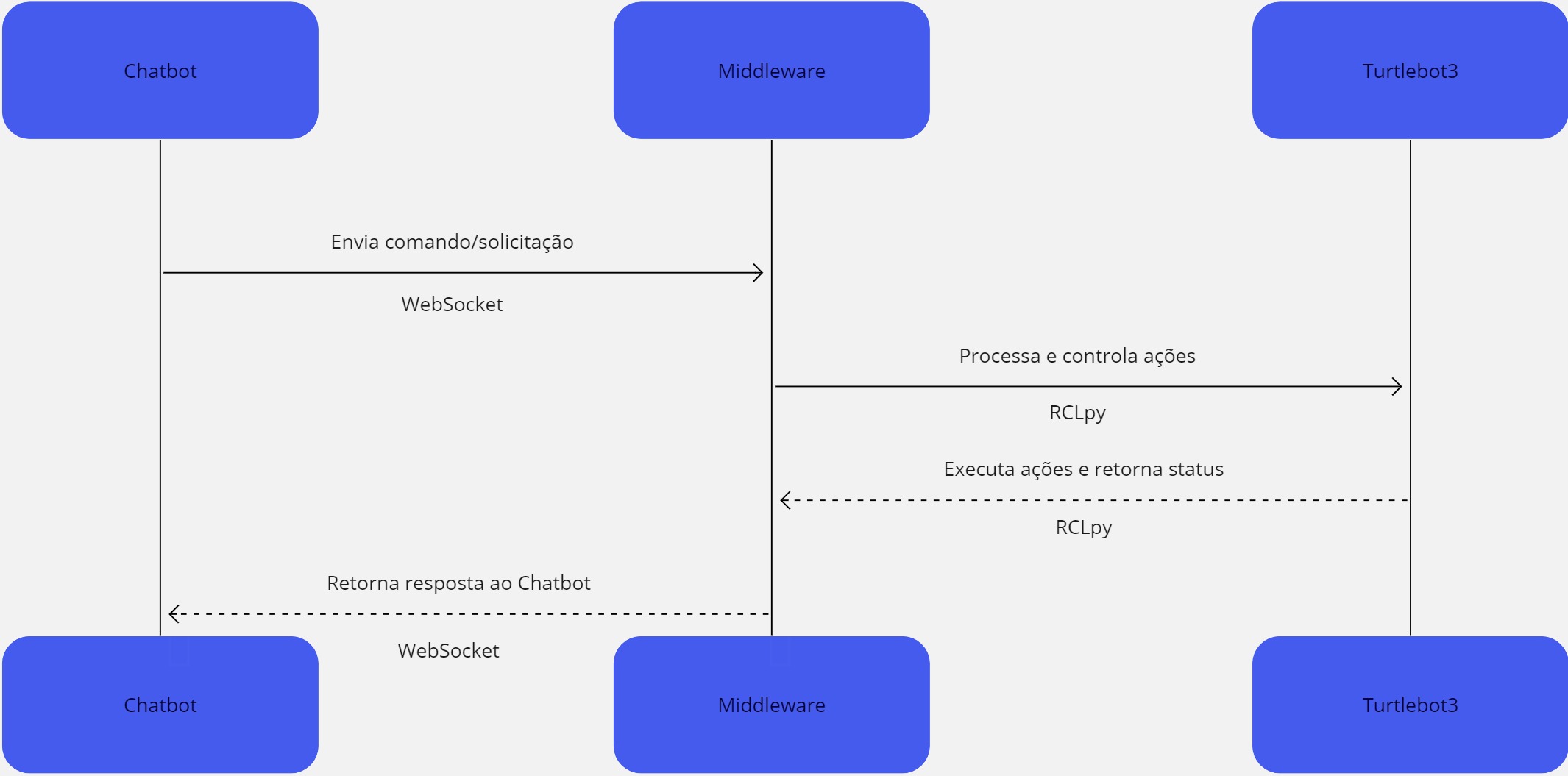
Fluxo de Comunicação
- Usuário para Chatbot: O usuário envia um comando ou solicitação através do WhatsApp.
- Chatbot para Servidor SocketIO: O chatbot interpreta o comando e envia as coordenadas ao servidor SocketIO.
- Servidor SocketIO para Middleware ROS2: O servidor recebe os dados e os redirecionam para o Middleware ROS2.
- Middleware ROS2 para Turtlebot3: O Middleware ROS2 processa as coordenadas e enviam elas para um outro nó responsável por gerenciar os pontos para os quais o robô deve ir.
- Execução pelo Turtlebot3: O Turtlebot3 executa as ações baseadas nos comandos recebidos.
Esta arquitetura, com a inclusão do servidor SocketIO, assegura uma comunicação fluida e em tempo real entre o usuário final, o chatbot, e o robô, permitindo uma interação dinâmica e eficiente.
Detalhes Técnicos
Integração com WhatsApp e Chatbot (
openai.ts):- Script TypeScript para integração da API do ChatGPT/OpenAI com WhatsApp.
- Código chave com comentários:
// Importando APIs necessárias
import { ChatGPTAPI } from "chatgpt";
import { Configuration, OpenAIApi } from "openai";
// Rota do webhook para processamento de mensagens do WhatsApp
app.post("/webhook", (req, res) => {
const userMessage = req.body.message; // Capturando mensagem do usuário
const chatbotResponse = ChatGPTAPI.processMessage(userMessage); // Processando mensagem
sendMessageToUser(chatbotResponse); // Enviando resposta para o usuário
});
// Configuração da conexão WebSocket e lógica atrelada ao GPT
export async function getPointOpenAI(message: Message, points) {
let prompt =
"Responda a pergunta abaixo com base no contexto para encontrar as coordenadas do lugar. Fique atento para possíveis variações no nome quando o usuário perguntar.Sempre responda na língua que o usuário se comunicar. Sempre dê as coordenadas no formato ([x], [y], [z])";
let jsonPoints = JSON.stringify(points);
let question = `Lista de pontos: ${jsonPoints}. Pergunta: Identifique a responsta do usuário com base na lista de pontos Resposta: ${message.body} e depois coloque as coordenadas do ponto em formato de float.`;
const response = await openai.createChatCompletion({
model: "gpt-4",
messages: [
{ role: "system", content: prompt },
{ role: "user", content: question },
],
});
let pointResponse = response.data.choices[0].message?.content;
const regex: RegExp =
/-?\d+(?:\.\d+)?,\s*-?\d+(?:\.\d+)?,\s*-?\d+(?:\.\d+)?/gi;
const match = pointResponse?.match(regex);
// Iniciando conexão Socket
const socket = io("http://10.128.64.39:3000");
if (match) {
match.forEach((coordinateString) => {
// Splitting the matched string into individual numbers
const parts = coordinateString
.split(",")
.map((part) => parseFloat(part.trim()));
const [x, y, z] = parts;
socket.emit("send_points", { x, y, z });
message.reply(pointResponse as any);
});
} else {
message.reply("Não consegui encontrar o ponto. Tente novamente.");
}
}Gerenciamento de Dados e Comunicação (
streamer.py):websocket_streamer.pypara gerenciamento da transmissão de dados, atua em nossa solução como um middleware entre o ROS2 e o servidor SocketIO.- Código chave com comentários:
class ClientWebSocket(Node):
def __init__(self):
super().__init__("client_websocket") # Inicializa a classe base Node com o nome "client_websocket"
self.sio = socketio.Client() # Cria um cliente SocketIO
self.sio.connect("http://localhost:3000") # Conecta o cliente SocketIO ao servidor na URL especificada
self.enqueue = Publisher(self, "enqueue", "/enqueue", Pose) # Cria um publicador para a fila de mensagens
self.status = Subscriber(self, "status", "/status", String) # Cria um assinante para receber atualizações de status
# Cria um objeto Streamer que lida com a transmissão de dados e interage com o cliente SocketIO
self.streamer = Streamer(self, self.sio, "/navigation", self.status, self.add_to_queue, self.enqueue)
def add_to_queue(self, data: dict[str, float]):
# Método para adicionar dados à fila. Registra informações e publica no tópico 'enqueue'
self.get_logger().info(f"Received data: {data} and publishing on {self.enqueue.topic_name}")
pose = Pose() # Cria um novo objeto Pose
pose.position.x = data["x"] # Define a posição x do Pose
pose.position.y = data["y"] # Define a posição y do Pose
pose.position.z = 0.0 # Define a posição z do Pose como 0.0
self.enqueue.publish(pose) # Publica o objeto Pose no tópico 'enqueue'Controle e Navegação do Robô (
vallet.py):vallet.pygerencia o controle do Turtlebot3 através do ROS2.- Código chave com comentários:
# Importações ROS2 para controle e navegação do robô
from geometry_msgs.msg import Pose, Point, Quaternion
from nav2_simple_commander.robot_navigator import BasicNavigator
# Classe para controle do navegador do robô
class NavigatorController(Node):
...
# Método para publicar o status do robô
def publish_status(self, status):
msg = String()
msg.data = status
self.robot_status.publish(msg) # Publicando status do robô
# Método para executar comandos de navegação
def execute_command(self, command):
if command['action'] == 'move':
# Movendo o robô para uma pose específica
self.navigator.go_to_pose(self.create_pose(command['x'], command['y'], command['theta']))
elif command['action'] == 'stop':
# Cancelando a navegação
self.navigator.cancel_navigation()
def go_to_pose(self, pos_x, pos_y, rot_z):
goal_pose = self._create_pose_stamped(pos_x, pos_y, rot_z)
self.navigator.goToPose(goal_pose)
...
class Vallet(Node):
...
def listener_callback(self, msg: Pose):
pos_x = msg.position.x
pos_y = msg.position.y
pos_z = msg.position.z
self.navigator_controller.go_to_pose(pos_x, pos_y, pos_z)
...
Processo de Integração
- Implementamos uma comunicação robusta entre o chatbot no WhatsApp, o servidor backend (TypeScript e Python), e o controle do Turtlebot3 via ROS2.
- Os comandos dos usuários são processados pela API do ChatGPT/OpenAI, transmitidos via WebSocket pelo
streamer.py, e então encaminhados aovallet.pypara execução no Turtlebot3.
Teste e Validação
Durante a fase de teste e validação, conduzimos uma série de experimentos para garantir a eficácia e a confiabilidade da integração entre o chatbot do WhatsApp, a API do ChatGPT/OpenAI, e o sistema robótico ROS2 com Turtlebot3. Os testes foram estruturados para avaliar vários aspectos do sistema, incluindo a precisão da interpretação dos comandos do chatbot, a eficiência da comunicação via SocketIO, e a precisão e segurança na navegação do robô.
- Teste do Chatbot: Validamos a capacidade do chatbot de entender e responder com precisão às solicitações dos usuários. Isso incluiu testes de diálogo em situações variadas para assegurar a robustez do processamento de linguagem natural.
- Teste de Comunicação com o SocketIO: Verificamos a estabilidade e a rapidez da comunicação entre o backend do sistema e o Turtlebot3. Os comandos foram transmitidos sem interrupções e em tempo real, assegurando uma operação fluida e contínua.
- Teste de Navegação do Robô: O Turtlebot3 foi submetido a vários cenários de navegação para garantir que ele se movimentasse e executasse tarefas conforme as instruções recebidas. Observamos a precisão na execução de comandos, a habilidade de evitar obstáculos e a eficiência no cumprimento das tarefas.
Os resultados dos testes foram satisfatórios, demonstrando que o sistema integrado é capaz de operar de maneira eficiente e confiável. A documentação detalhada desses testes, juntamente com um vídeo gravado das sessões de teste, fornece uma visão clara da funcionalidade e eficácia do sistema. Esta fase de teste e validação é crucial para assegurar que nosso sistema não só atenda às expectativas teóricas, mas também funcione de maneira eficiente e segura no ambiente real da fábrica. O vídeo gravado das sessões de teste servirá como uma demonstração prática dos resultados obtidos e da operação do sistema no contexto real.
Conclusão
A integração entre o chatbot do WhatsApp e o sistema robótico ROS2 e Turtlebot3 representa um avanço significativo na automação e eficiência da logística na fábrica da Ambev, objetivo de nosso projeto. Esta inovação melhora a produtividade e oferece uma interface de usuário intuitiva e eficaz. Os códigos comentados fornecem uma visão clara da lógica e funcionamento interno do projeto a os interessados, destacando a complexidade e eficácia da solução desenvolvida.